
Have you ever owned a Roomba? It’s quite possibly the most inefficient tool that was designed solely for optimizing human efficiency. I would estimate one out of every 23 people who own a Roomba actually turn theirs on, lets it roam through their home cleaning the floors, and then go about living their lives to use the valuable time they’ve now saved by not having to push a vacuum themselves. Meanwhile, the other 22 of us turn the thing on, let it go, and watch in amazement, accomplishing nothing else with our now free limbs because, “How crazy is it to watch this little robot freely drive itself around my home, eating dust off my floor?”
And of those 22, I’d make another estimation at least half of them go the extra mile of sharing this moment on their Instagram stories so the rest of the world can see they’re using their newfound free time so wisely. Technology is too cool for its own good sometimes.
Well, a team of scientists from Florida Atlantic University (FAU) and the U.S. Office of Naval Research just created the ocean-monitoring version of little swimming Roombas. Appropriately called “jellybots,” the tiny machines were designed to mirror a moon jellyfish during the larval stage of its life cycle, using soft rubber silicone tentacles to propel itself through the water and swim around delicate areas like reefs.
“Studying and monitoring fragile environments, such as coral reefs, has always been challenging for marine researchers. Soft robots have great potential to help with this,” said Dr. Erik Engeberg, one of the robot’s inventors from Florida Atlantic University. “Biomimetic soft robots based on fish and other marine animals have gained popularity in the research community in the last few years. Jellyfish are excellent candidates because they are very efficient swimmers. Their propulsive performance is due to the shape of their bodies, which can produce a combination of vortex, jet propulsion, rowing, and suction-based locomotion.
“A main application of the robot is exploring and monitoring delicate ecosystems, so we chose soft hydraulic network actuators to prevent inadvertent damage,” he added.
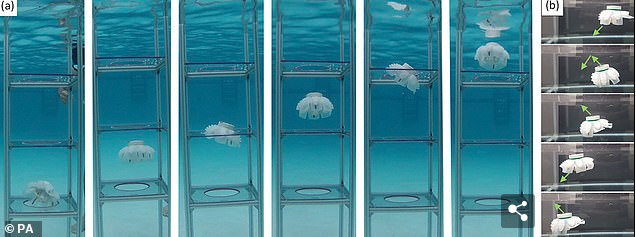
The robots were tested by squeezing through holes cut in a plexiglass plate. Five jellybots were made of different levels of firmness, all using 3-D printing. And future models will be made with environmental sensors and navigational programming so they can intelligently find gaps in the reefs they explore and independently decide whether or not to swim through them.
